MultiBody-Bibliothek: Connector
Anschlusspunkt ("Connector"):
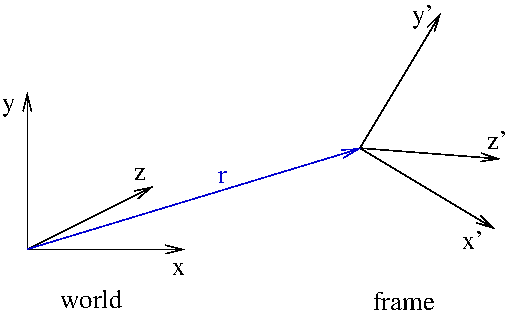
beschreibt lokales Koordinatensystem
frame
immer vorhanden: globales Inertialsystem
world
definierte Größen
r
Vektor von
world
zu
frame
, bezogen auf
world
R
Drehmatrix, die
world
in
frame
dreht
F
Schnittkraft, bezogen auf
frame
M
Schnittmoment, bezogen auf
frame
Anzahl der Freiheitsgrade
6 Flowgrößen F, M
6 Potentialgrößen r, R
Problem: Drehmatrix R sind 9 Größen und 6 Nebenbedingungen (wegen R' R = 1)
Regel bei Verbindungen
r, R gleich
F, M addieren sich zu Null