Global hybrid model
Implementation of subsystems:
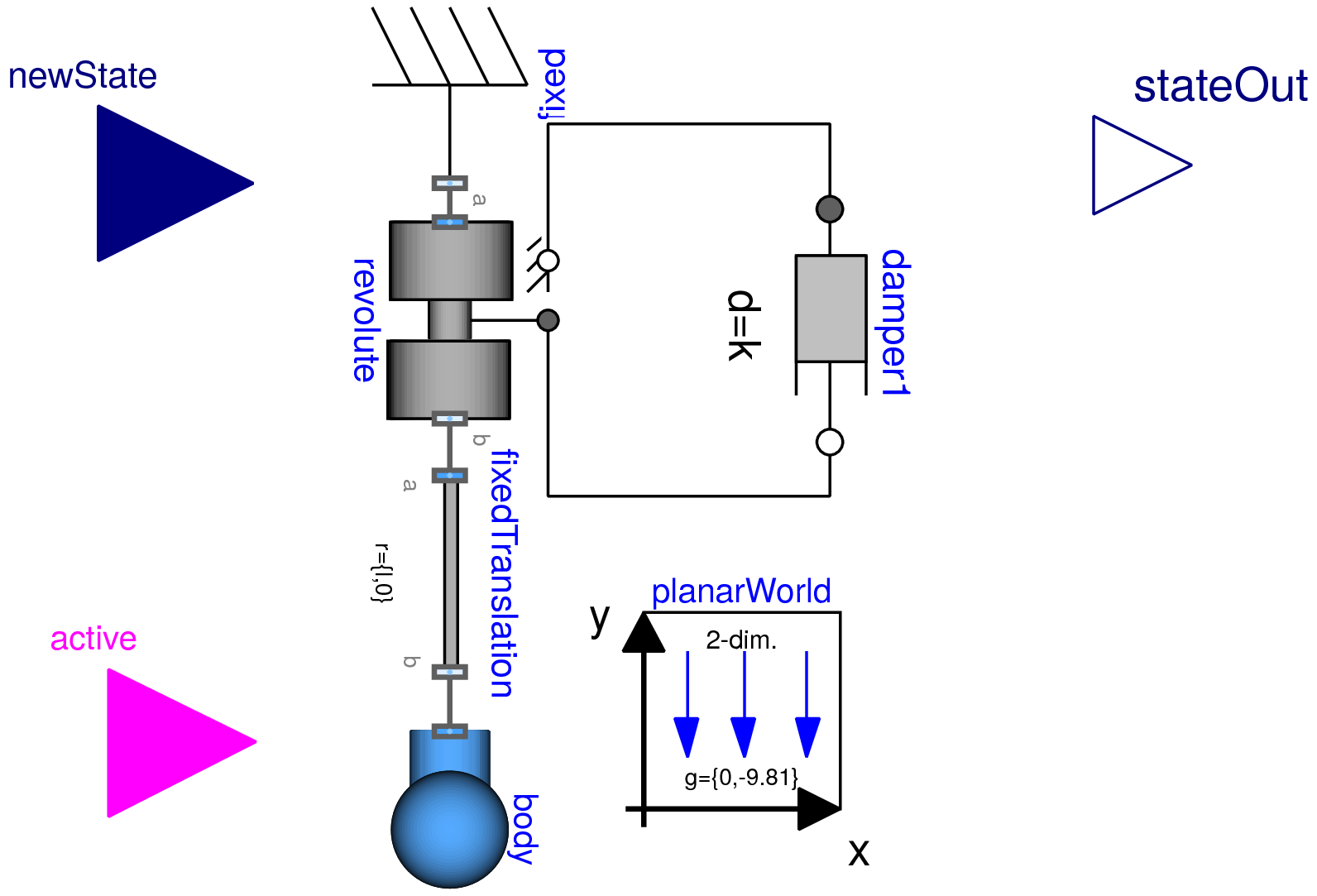
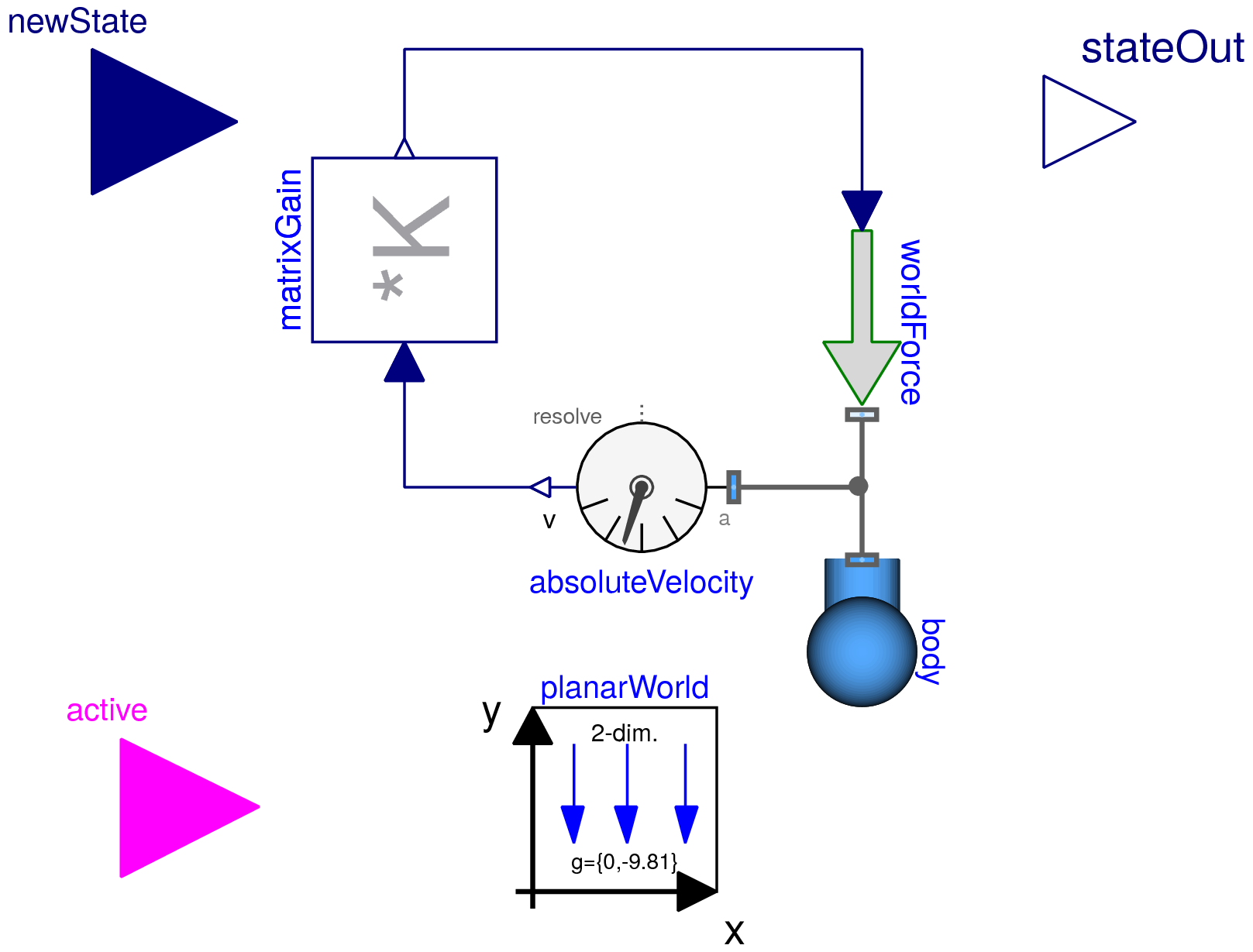
inherit SwitchableSystem
are constructed graphically
identify state variables within graphical model, e.g.
state[1] = pi/2 - revolute.phi; state[2] = -revolute.w;
Is this a hybrid decomposition?
it looks like one
submodels can be created graphically and independently
formally: maximal state space approach
variables of inactive system ignored or derivatives set to zero
they always exist and enlarge the total state space
practically
Modelica compilers routinely handle systems with lots of trivial equations
should not be a large burden