Kalman-Filter
- Prinzip des Kalman-Filters:
- macht Vorhersage für nächsten Zustandswert
xk+1 und Genauigkeit Pk+1 (Kovarianzmatrix P des
Filters)
- geht von linearem diskreten Modell aus
- bekommt außerdem Messwerte zk
- 1. Schritt: Vorhersage aufgrund des Modells (Prädiktor)
- 2. Schritt: Korrektur aufgrund des Messwerts (Korrektor)
- Schätzwerte für die Anfangswerte x0
und P0 müssen vorgegeben werden
- Kalmanfilter mathematisch definiert durch
- erwartungstreu (reproduziert Erwartungswerte)
- Erwartungswert der quadratischen Abweichung zwischen
Schätz- und wahrem Wert minimal
- Formeln sind plausibel:
- R groß → K klein → xk =
xk- (Modell gibt Ausschlag)
- R = 0 → K = H-1 → xk
= H-1 zk (Messwert gibt Ausschlag)
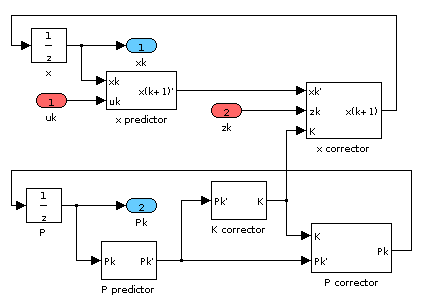
- Simulink-Modell des Kalman-Filters:
- Subblock
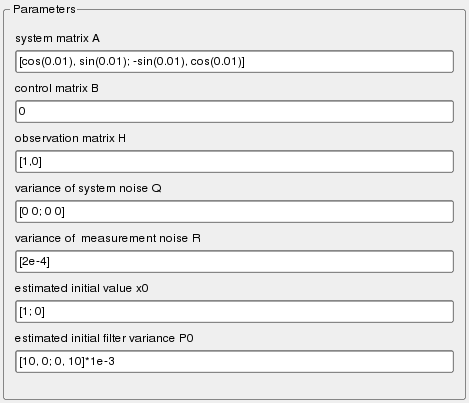
- Parameter
- Aufbau
- 5 Unterblöcke implementieren die Formeln
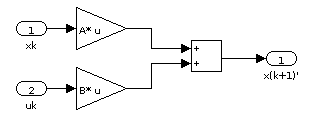
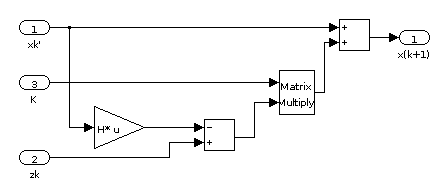
- x predictor
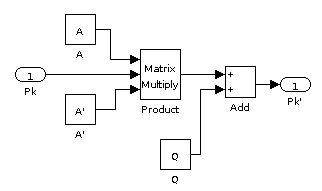
- P predictor
-
- K corrector
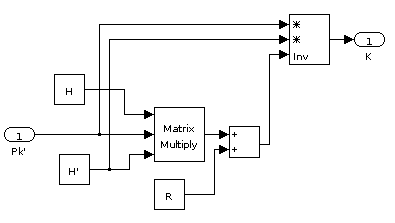
- x corrector
- P corrector
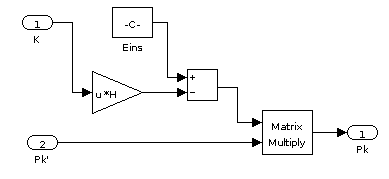
- Achtung:
- 1 in Formel für Pk ist die Einheitsmatrix
- im Simulink in einer Konstanten mit Constant Value
- eye(size(P0))
- Startbeispiel, 2. Durchgang:
- Aufbau klar
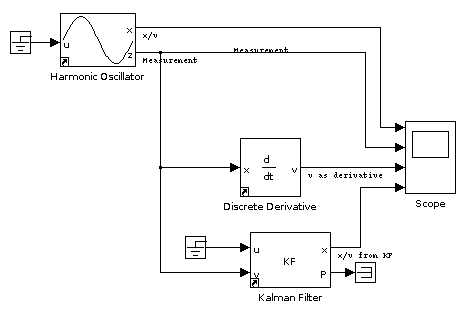
- Modell ist harmonischer Oszillator in diskreter Version
- Kalmanfilter hat die entsprechenden Systemparameter
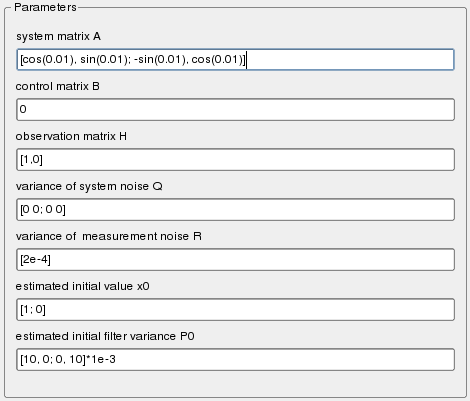
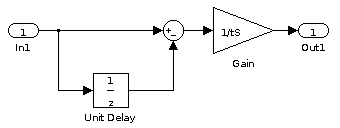
- der Vollständigkeit halber die diskrete Ableitung