Simulation des Flugs
- Erweiterung um Flug-Modell:
- Modell eines Geradeausflugs mit Start- und Landungsphase
- erzeugt Messwerte wie in ins1
- erlaubt Vergleich von Modell- und Filterwerten
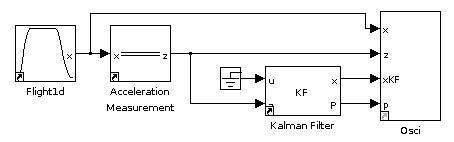
- Simulink-Modell ins2.mdl
- gleiche Konfiguration des Kalman-Filters
- Flug-Modell:
- liefert x/v/a mit
- Startphase (Beschleunigung in vorgegebener Zeit auf
Fluggeschwindigkeit)
- Flugphase (konstantes v)
- Landephase (Abbremsen in vorgegebener Zeit auf v =
0)
- Beschleunigung enthält Systemrauschen
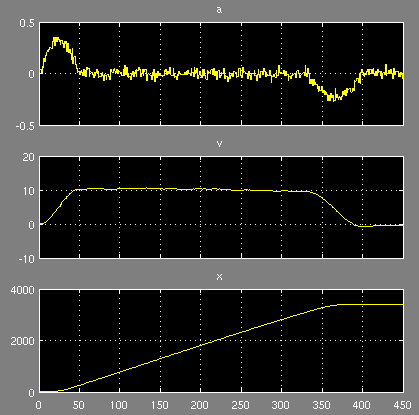
- aufgrund der a-Schwankungen landet v nicht genau bei
0
- Parameter
-
| Bezeichnung |
Variable |
| duration of start |
tS |
| duration of cruise |
tF |
| duration of landing |
tL |
| cruise velocity |
v0 |
| variance of acceleration |
q |
| sample time |
dt |
| initial seed |
seed |
- Aufbau
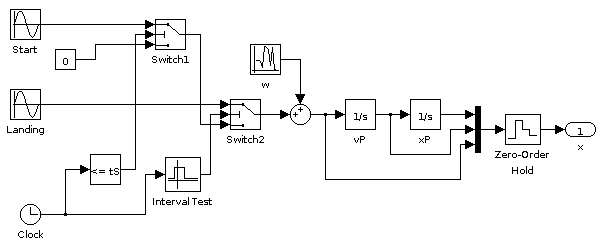
- Start- und Landephase werden als positive bzw. negative
Sinus-Halbwelle modelliert
- Switch1 schaltet die Startphase durch für t ≤
tS, sonst ist a = 0
- während der Landephase (tS+tF ≤ t ≤ tS+tF+tL)
schaltet Switch2 auf die Landing-Halbwelle
- besondere Details
- bei Compare und Interval Test sollte Output data type
mode auf boolean
- Parameter von Start
- Amplitude v0*pi/(2*tS)
- Frequency pi/tS
- Parameter von Landing
- Amplitude -v0*pi/(2*tL)
- Frequency pi/tL
- Phase -pi*(tS+tF)/tL
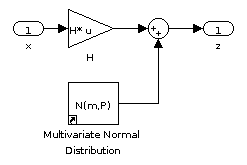
- Mess-Modell:
- allgemeines lineares Messmodell als eigener Block
- Parameter
-
| Bezeichnung |
Variable |
| observation matrix |
H |
| variance of measurement |
R |
| sample time |
dt |
| initial seed |
seed |
- hier H = [0 0 1] → nur a wird gemessen
- Ergebnisse der Simulation:
- Beschleunigung
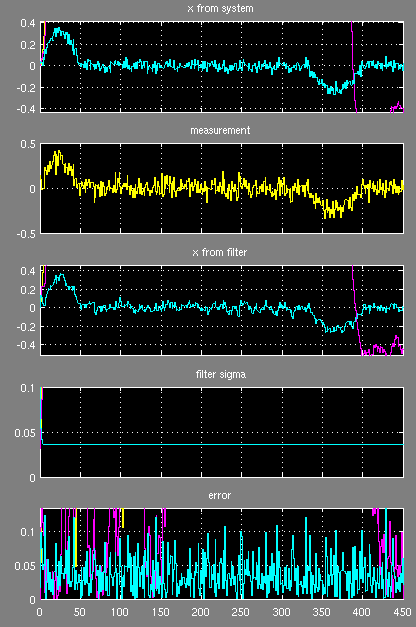
- a vom System und a vom Filter nahezu identisch
- Fehler in der Größenordnung der Filtervarianz
- Ort
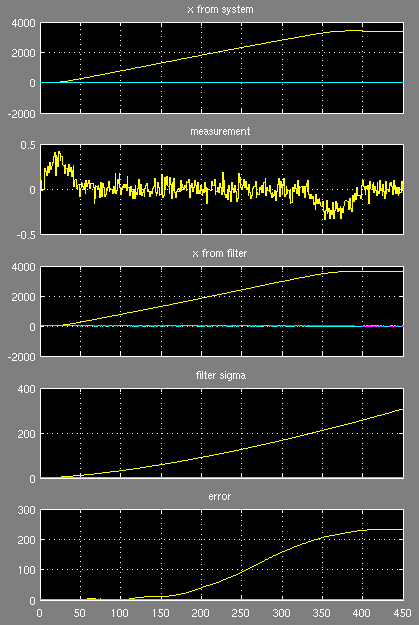
- Abweichung von x wächst kontinuierlich an
- Filtervarianz steigt entsprechend
- klar: Messmethode liefert prinzipiell keine besseren
Werte