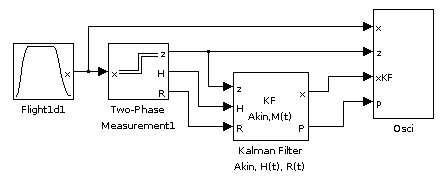
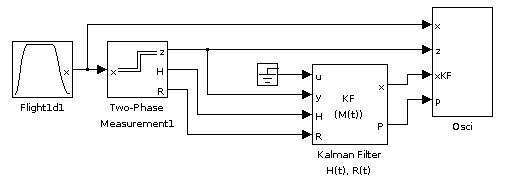
- Modell ins3.mdl
- wie ins2.mdl, aber andere Parameter (in Messung und Filter!)
- H = [0 0 1; 1 0 0]
- R = [0.003, 0; 0, 1]
- zusätzlich wird auch x gemessen, allerdings mit niedriger Genauigkeit
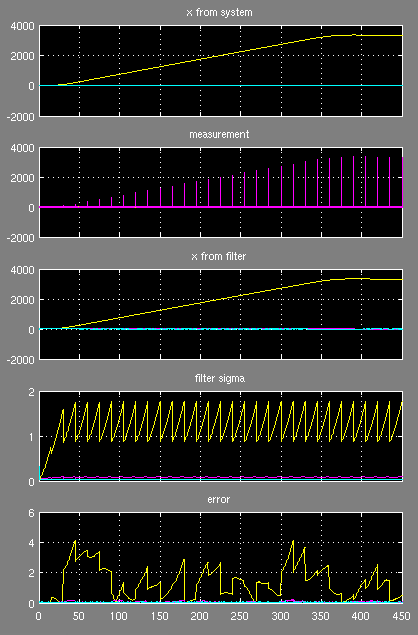
- Ergebnis
- Fehler bleibt beschränkt, aber relativ groß
- höhere Genauigkeit der x-Messung
- → keine wesentliche Verbesserung
- vermutete Ursache: internes Zufallspfad-Modell kann der schnellen Änderung von a nicht folgen
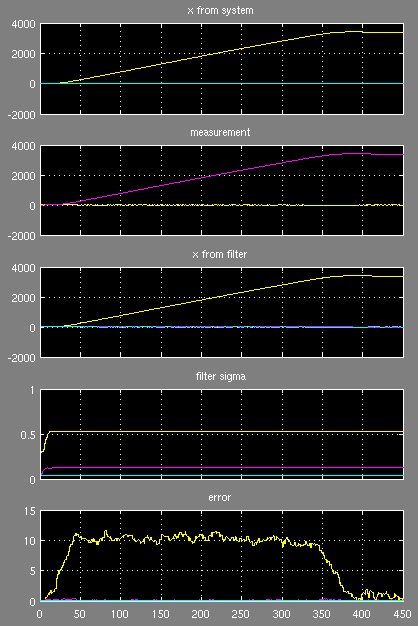
- Modell ins4.mdl
- Mess-Block liefert verschiedene Arten von Messungen
- jedes n-te Mal (n einstellbar) a und x mit entsprechendem R
- sonst nur a
- Kalman-Filter braucht sich änderndes (zeitabhängiges) H und R
- Ergebnis bei x-Messung bei jedem 15. Schritt
- Fehler bleibt in der Größenordnung des vorigen Modells
- hat zwei verschiedene Messmethoden (jeweils mit H und
R)
- verwendet normalerweise H1, aber jedes n-te Mal H2
- Parameter
-
Bezeichnung Variable observation matrix H1 H1 observation matrix H2 H2 variance of measurement R1 R1 variance of measurement R2 R2 decimation factor n of measurement 2 n sample time dt initial seed seed
-
- Aufbau
- Hit Test schaltet jedes n-te Mal durch
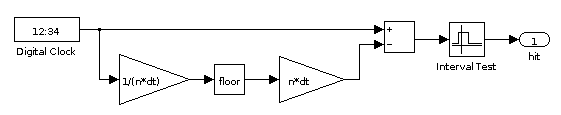
- Interval Test statt Test auf 0 wegen möglichen Rundungsfehlern
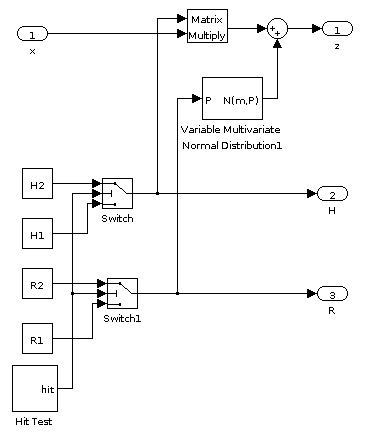
- H und R nicht fest über Parameter, sondern variabel über Eingänge
- Aufbau
-
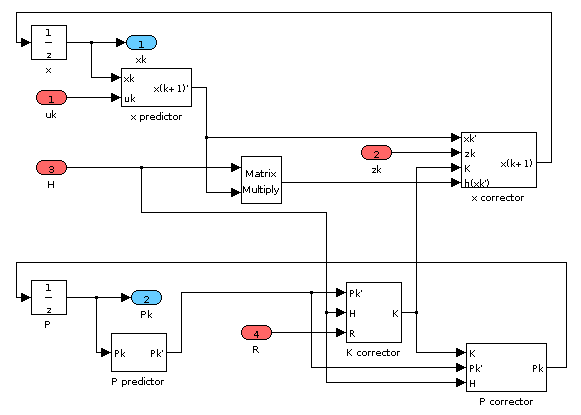
- setzt Formeln in direkter Weise um
-
- Änderung von dt → A und Q ändern sich
- daher bei Kalman-Filter auch A und Q als Eingänge

- nur noch x0 und P0 als Parameter
- Implementierung wie üblich
- daraus spezielles Kalmanfilter für kinematisches
Modell
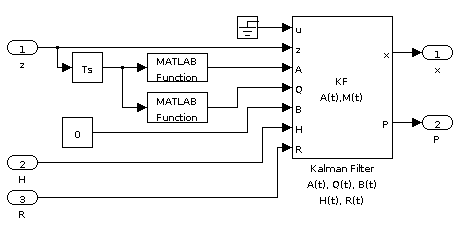
- Block Ts bestimmt Sample Time der Messung
- Matlab-Funktion für A
- [1, u, 0.5*u^2; 0, 1, u; 0, 0, 1]
- Matlab-Funktion für Q
- [0.050*u^5, 0.125*u^4, 0.167*u^3;...
0.125*u^4, 0.333*u^3, 0.500*u^2; ...
0.167*u^3, 0.500*u^2, 1.000*u]*q - mit Parameter q für Kovarianz des kontinuierlichen Systems
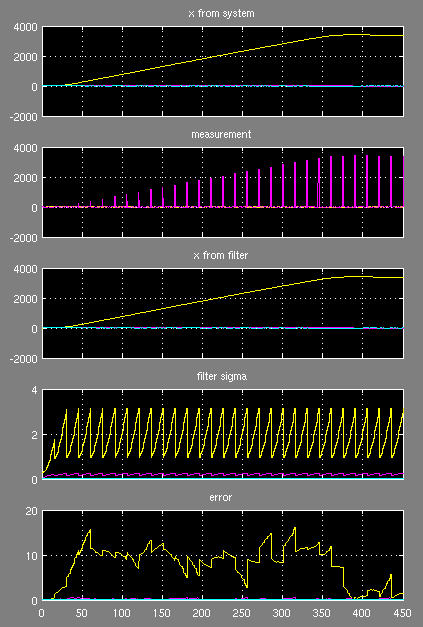
- Gesamtmodell ins5.mdl
- Lauf mit Sample Time = 0.1 (bei Flight1d und Measurement!)
und Dezimierung um n = 150 der Ortsmessung
- Ergebnis
- Zahl und Genauigkeit der Ortsmessungen wie vorher
- aber Fehler hat stark abgenommen
- also Vermutung bestätigt: genauere Beschleunigungsmessungen nötig für einfaches Zufallspfad-Modell