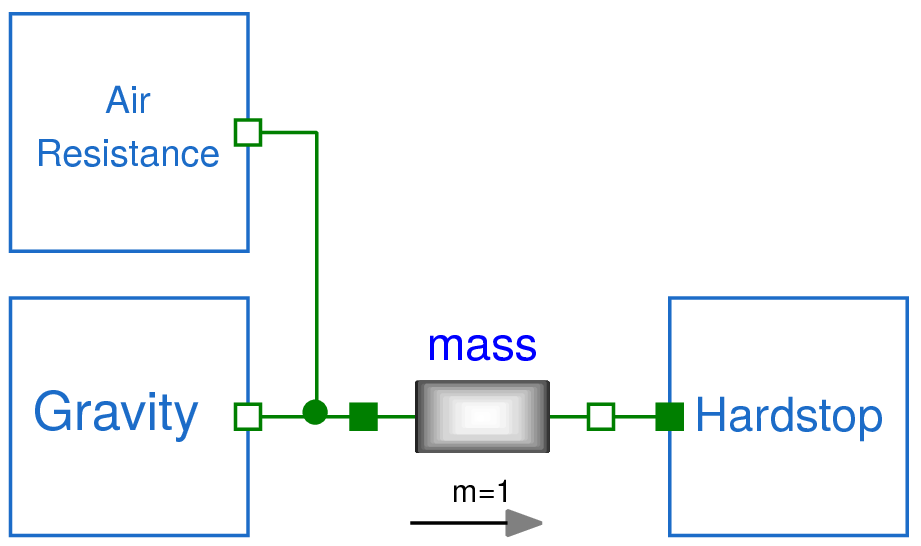
when s <= 0 then reinit(v, -mu*pre(v)); end when; flying = not (s <= 0 and v <= 0); f = if flying then 0 else -m*g;