A probabilistic state space model
- Basic state space description:
- definition
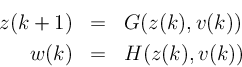
-
| z |
internal state |
| v |
model input |
| w |
model output |
| G |
state change function |
| H |
output function |
- implementation in Simulink
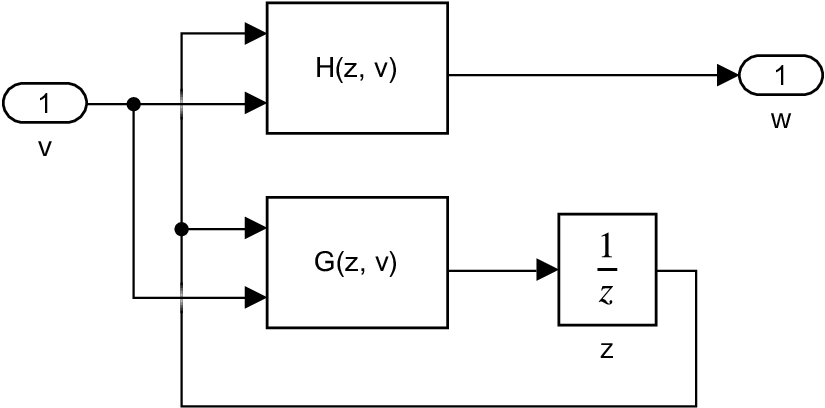
- specify H, G
- Probabilistic state-space description:
- adds a stochastic disturbance ξ(z)
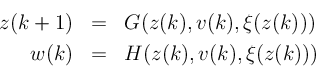
- distribution of ξ depends on z
- implementation in Simulink
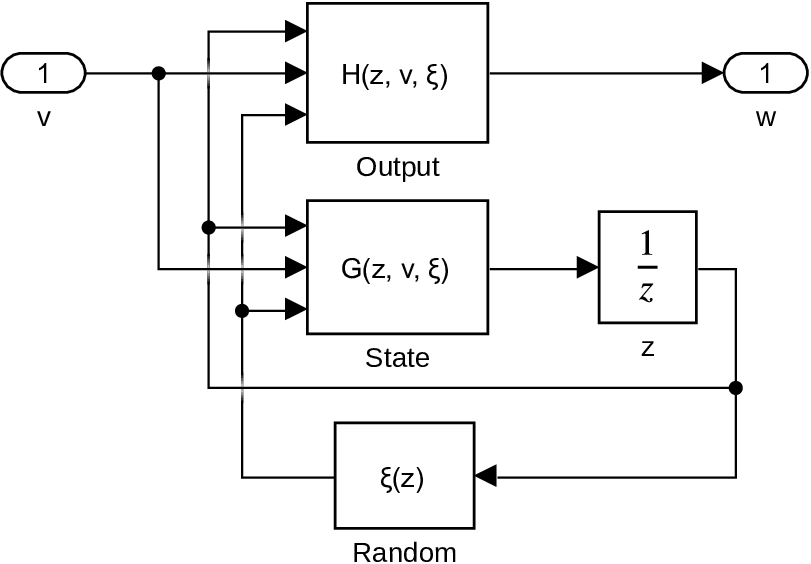
- specify H, G, ξ


