Steife Probleme
- Steifer Tilger:
- betrachtet wird wieder das System aus Schwinger und
Tilger
von oben
- was geschieht, wenn die Feder zum Tilger immer steifer
wird (d.h. ihre Federkonstante und Dämpfung nehmen stark zu)?
- Erwartung
- Tilger und Schwinger sind quasi "fest" miteinander
verbunden
- Schwinger bewegt sich wie ohne Tilger (bis auf
dessen kleine Zusatzmasse)
- Tilger bewegt sich in festem Abstand mit dem
Schwinger mit
- Ergebnis der Simulation für Faktor 100000
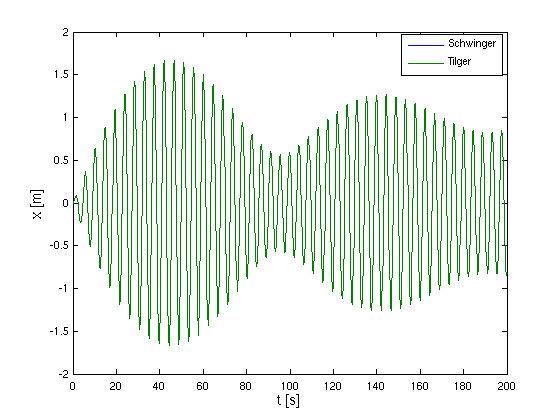
- Schwinger und Tilger schwingen genau im Takt,
minimaler Unterschied
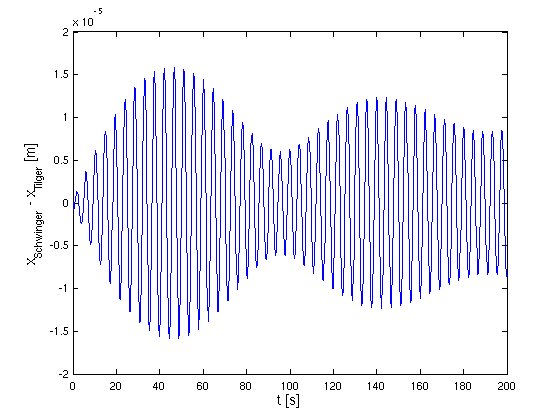
- aber: Rechenzeit des Solvers (ode45) ist dramatisch angestiegen (Faktor 1000!)
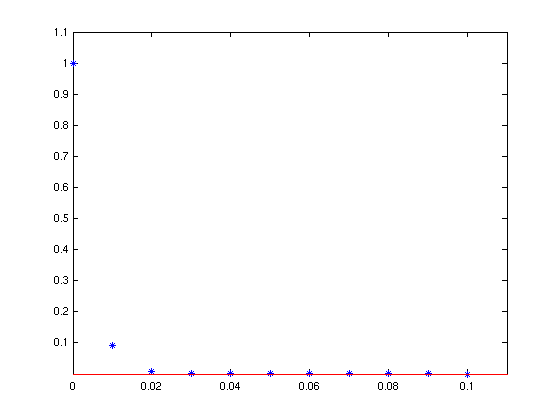
- Schrittweiten beim Beispiel "Radioaktiver Zerfall":
- System gegeben durch

- mit λ < 0
- i. F. grundlegendes Beispiel
- Simulation mit adaptivem Solver ode45 mit verschiedenen Genauigkeiten tol und für verschiedene Werte des Parameters λ
- Zeitbereich jeweils von t = 0 bis t = 60
- gemessen wird Zahl der Zeitschritte mit length(t)
- Ergebnisse
-
| tol |
1e-3 |
1e-4 |
1e-5 |
1e-6 |
| -λ |
|
|
|
|
| 0.1 |
45 |
53 |
69 |
81 |
| 10 |
773 |
793 |
809 |
817 |
| 1000 |
72365 |
72381 |
72401 |
72409 |
- 1. Beobachtung:
- Zahl der Zeitschritte steigt nur langsam mit tol
- Ursache: einfache glatte Lösungsfunktion exp(λ
t)
- 2. Beobachtung:
- Zahl der Zeitschritte wächst stark für (betragsmäßig)
großes λ
- unverständlich, denn Lösung ist im Rahmen der geforderten
Toleranz fast = 0!
- typisches Verhalten "steifer" Systeme
- Untersuchung der Ursache beim Eulerverfahren:
- Eulerverfahren liefert für N-ten Zeitschritt
- für h λ < -1 wechselndes Vorzeichen
- für h λ < -2 sogar betragsmäßig exponentieller
Anstieg
- also für großes negatives λ
- Lösung ist völlig harmlos (i.w. = 0)
- Verfahren funktioniert nur für sehr kleine Schrittweiten
- ähnliches Verhalten bei allen bisher behandelten Verfahren
- Grundproblem:
- winzig kleine Störungen erzwingen winzige Schrittweiten
- → lange Rechenzeiten
- → ungenau wegen Aufschaukeln kleiner Fehler
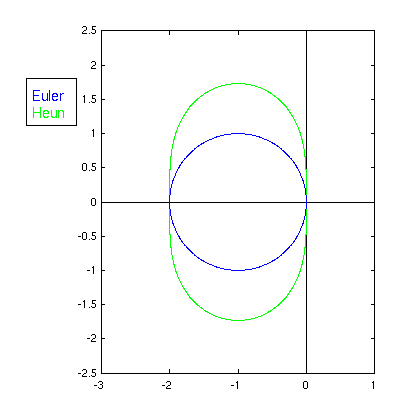
- A-Stabilitätsgebiet eines Solvers:
- Bereich für z = h λ (als komplexe Variable gedacht),
in dem ein Verfahren für das Beispiel eine nicht-ansteigende Lösung liefert,
d.h. es gilt
- Beispiel Euler
- Beispiel Heun
- im Bild
- Implizites Eulerverfahren:
- bei Euler: Ableitung am Startpunkt

- bei exponentiellem Abfall dort noch zu groß →
Überschießen
- statt dessen: Ableitung am Endpunkt

- dort Ableitung schon klein → ok
- Problem
- gesuchte Größe y(t + h) auf beiden Seiten der Gleichung
(nur implizit gegeben)
- steht in Funktion f → Auflösung eines nichtlinearen
Gleichungssystems nötig
- iterativ, etwa mit Newton
(mehrdimensional - i. a. sehr aufwändig!)
- Vorteil: guter Startwert der Iteration vom letzten
Zeitschritt
- im Beispiel einfach explizit auflösen
- Ergebnis für λ = -1000 und Schrittweite 0.01
- Stabilitätsgebiet
- im Bild
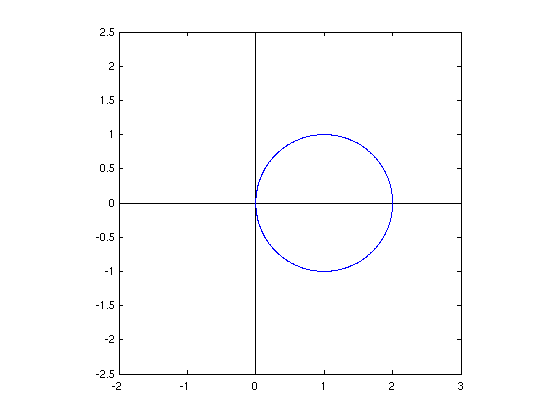
- insbesondere für alle λ< 0 stabil
- auch für viele λ > 0 stabil (unerwünscht!)
- Implizite Verfahren höherer Ordnung:
- Trapez-Verfahren (2. Ordnung)
- Integriere Differentialgleichung

- über [t, t+h] →
- mit der Trapezregel
- Stabilitätsgebiet: Im(z) < 0 (optimal)
- weitere Verfahren als Runge-Kutta-Schema mit vollbesetzter
Matrix B
- Newton-Verfahren zur Lösung
- braucht Jacobimatrix J der
Differentialgleichung
- alternativ Ableitung numerisch nähern
- Beispiel van-der-Pool-Oszillator:
- gegeben durch
- als System
- zugehörige Jacobimatrix
- in Matlab
- Funktionen f(t,y) und J(t,y) definieren
- Jacobimatrix als Option bekanntmachen
- options = odeset("Jacobian", J);
- mit steifem Solver lösen, z.B. ode15s
- Aufgaben: