Lösung von Aufgabe 21
- Alle Berechnungen können mit dem
Matlab-Skript ex21.m ausgeführt werden.
- Zunächst muss die Differentialgleichung - wie oben
beschrieben - in die Grundform gebracht werden. Die Funktion f kann dann
z. B. definiert werden durch
- omega = 8.0;
f = @(t,y) [y(2); -omega^2*y(1)];
- Die einzelnen Formeln des Algorithmus lassen sich direkt
nach Matlab übertragen, wenn man noch die Beträge bei Vektoren durch
die norm()-Funktion ersetzt.
- Alternativ zur Handarbeit können die einzelnen Zeitschritte
bis zum Überschreiten der Endzeit bequem in
einer while-Schleife durchlaufen werden. Dabei
werden die anfallenden Ergebnisse (Zeiten und y-Werte) zur späteren
Auswertung in Arrays tall
und yall gesammelt.
- Man erhält dann folgende Schritte:
-
| h |
t |
epslok |
|
| 0.0058 |
0.0058 |
0.000017 |
ok |
| 0.0290 |
0.0348 |
0.001933 |
ok |
| 0.0865 |
0.1213 |
0.017935 |
ok |
| 0.1227 |
0.2440 |
0.007227 |
ok |
| 0.2356 |
0.2440 |
0.323707 |
zu groß
|
| 0.1274 |
0.2440 |
0.187370 |
zu groß |
| 0.0827 |
0.3266 |
0.012660 |
ok |
| 0.1317 |
0.4584 |
0.069428 |
ok
|
| 0.1190 |
0.5774 |
0.010382 |
ok |
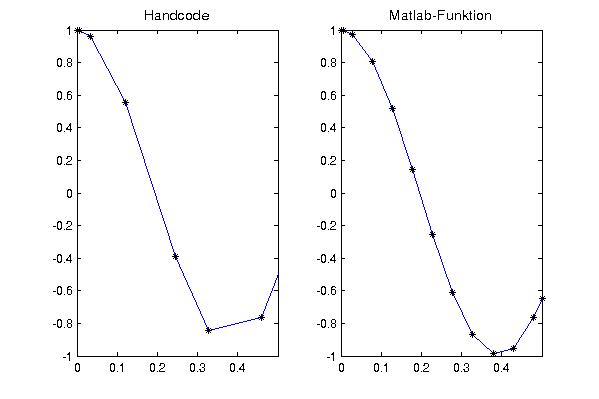
- Vergleich mit Matlabs ode23:
- Am auffälligsten ist die generell kleinere Schrittweite bei
Matlab. Ursache ist die Beschränkung von h auf maximal 1/10 des
Zeitintervalls. Dadurch ist das Ergebnis insgesamt genauer als der
Handcode, aber auch genauer als gefordert. Durch Vergleich mit der
bekannten Lösung
- erhält man leicht den tatsächlichen maximalen Fehler
- errMax(Handcode) = 0.1005
- errMax(Matlab) = 0.0089
- Außerdem wird bei Matlab die Endzeit genau erreicht,
während der Handcode darüber hinausschießt. Dies lässt sich durch eine
Anpassung der Schrittweite am Ende leicht erreichen.