Lösung von Aufgabe 16
-
Bewegungsgleichungen:
-
Kräfte- und Momentenbilanz um den Schwerpunkt S bzw. für die
Radkästen
-
für kleine Auslenkungen ist der Zusammenhang zwischen
x1,2 und x, φ
-
Eliminieren von x1,2 und Umsortieren liefert die
bekannte Matrixform
-
mit den Matrizen
-
Eigenwerte und Modalmatrix für B = 0:
-
Numerische Lösung des Eigenwert-Problems liefert
-
Modaltransformationen:
-
Transformation der Matrizen und Vektoren mit Φ ergibt
- Beobachtung: Auch die Matrix B wird durch Φ
diagonalisiert.
-
Ursache: Es liegt proportionale Dämpfung vor mit
-
Modaltransformation entkoppelt daher die Bewegungsgleichungen
vollständig in
-
Lösung der Bewegungsgleichungen:
-
Lösung in Hauptkoordinaten wie im 1d-Fall: komplexer Ansatz
-
ergibt
-
Einsetzen der Werte →
-
in Polardarstellung ist dies
-
Lösung in Hauptkoordinaten somit
-
Rücktransformation von y erfordert Zusammenfassen der
Cosinus-Funktionen. Dies geht wesentlich einfacher im Komplexen,
indem man erst die z-Amplituden zurücktransformiert und dann den
Realteil nimmt:
-
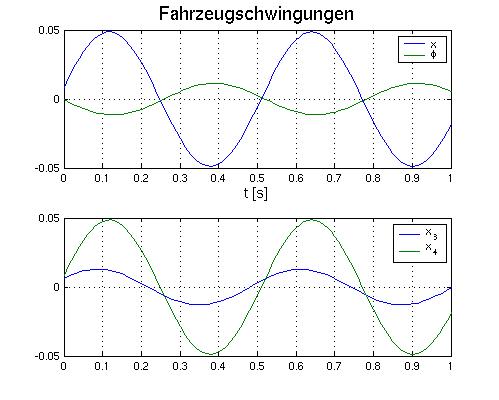
im Bild
-
Amplituden der Hubschwingung
 = 4.87 cm,
= 4.87 cm,
-
der Nickschwingung
 = 0.0114
= 0.0114  0.65°
0.65°
- Interessanterweise schwingt der rechte Radkasten
wesentlich stärker als der linke.